just an update to say no, i did not successfully make a motor controller in 48 hours 🙂
(see previous post for schematic: http://www.orangenarwhals.com/?p=152)
what was it? a 6.131 final project / motor controller for hexarideablepod (derived off of an instructables):

which works, but uses an arduino and two victor speed controllers — total overkill. also, terrible UI: it uses a hard to reach switch for fwd/bwd and foot pedals, which little kids have issues reaching even with the awesome!adjustable-car-seat.
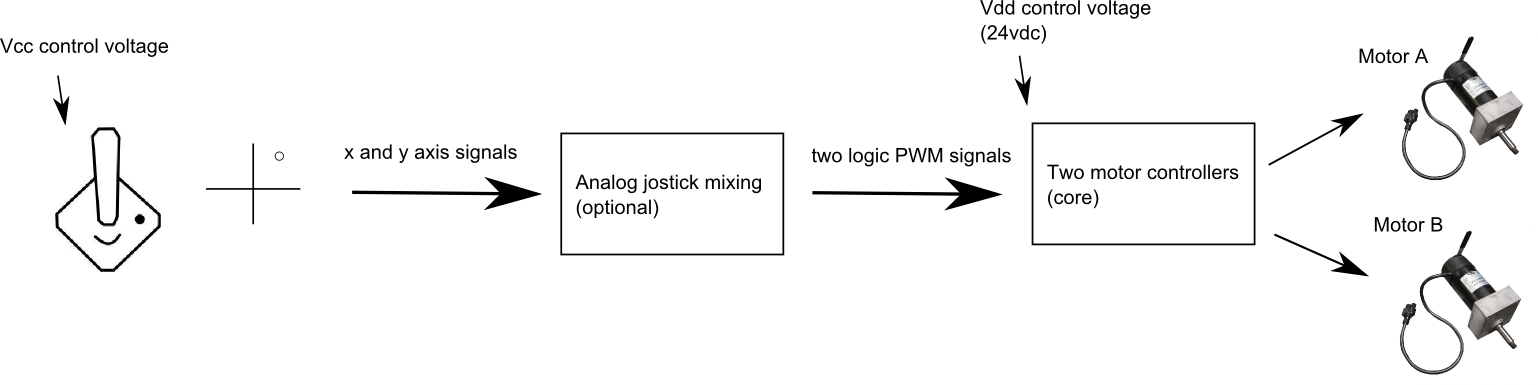 |
| block diagrams! ewww. |
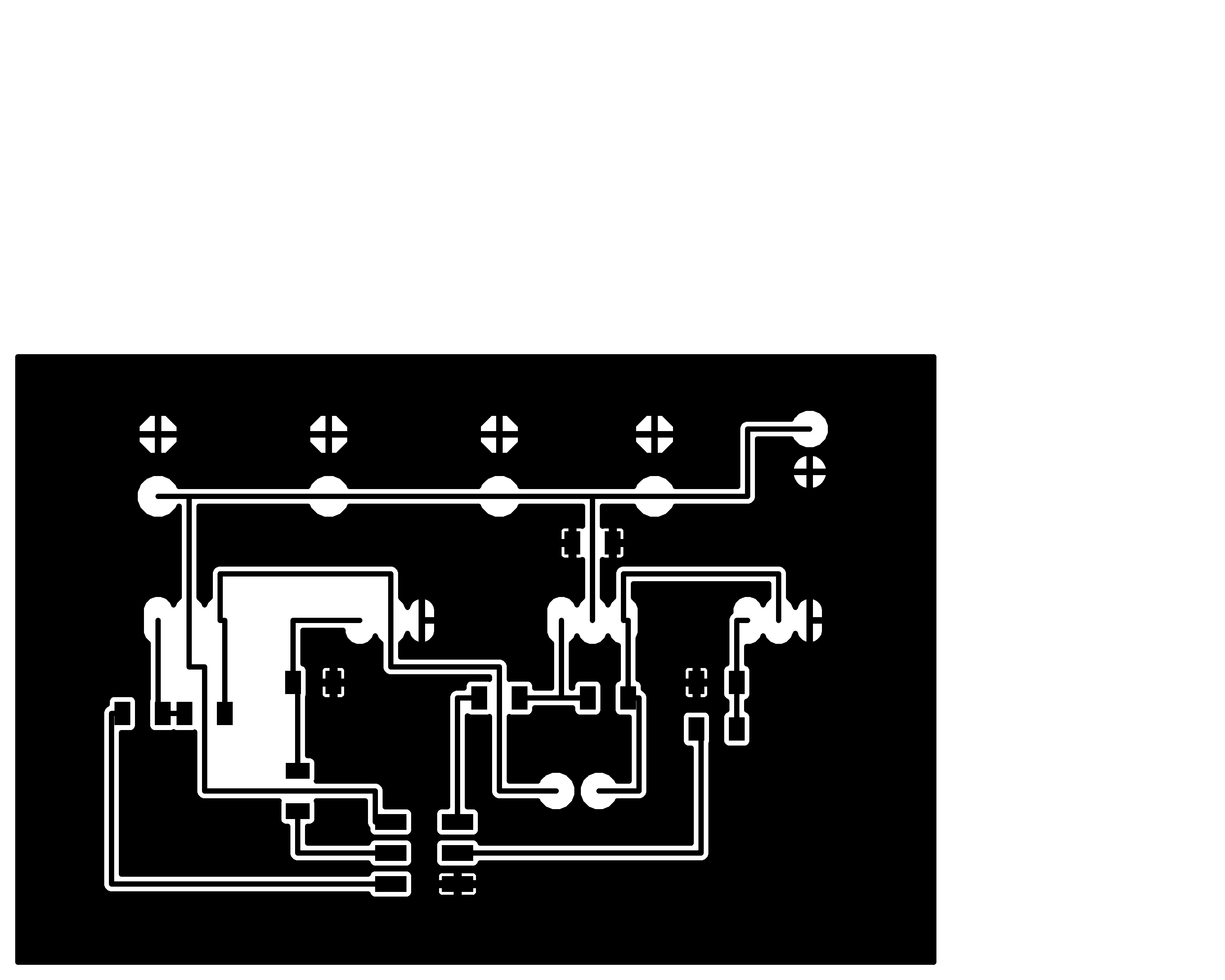
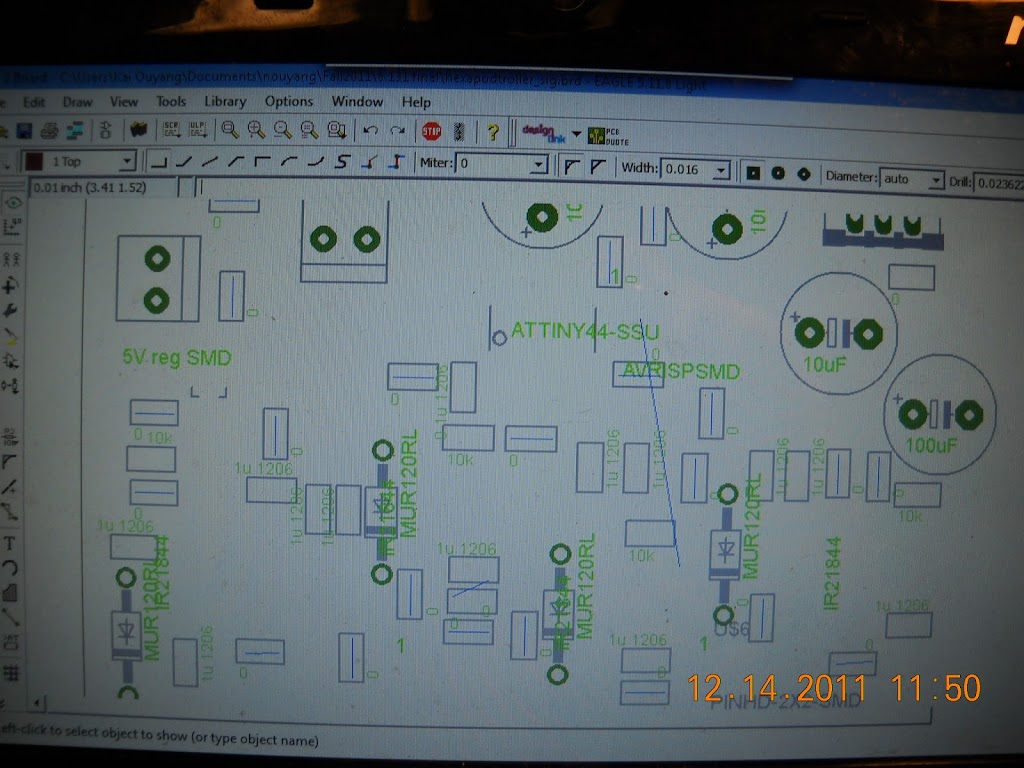
https://github.com/nouyang/hexapodtroller for the eagle sch/brd. You can see terrible routing here:
 |
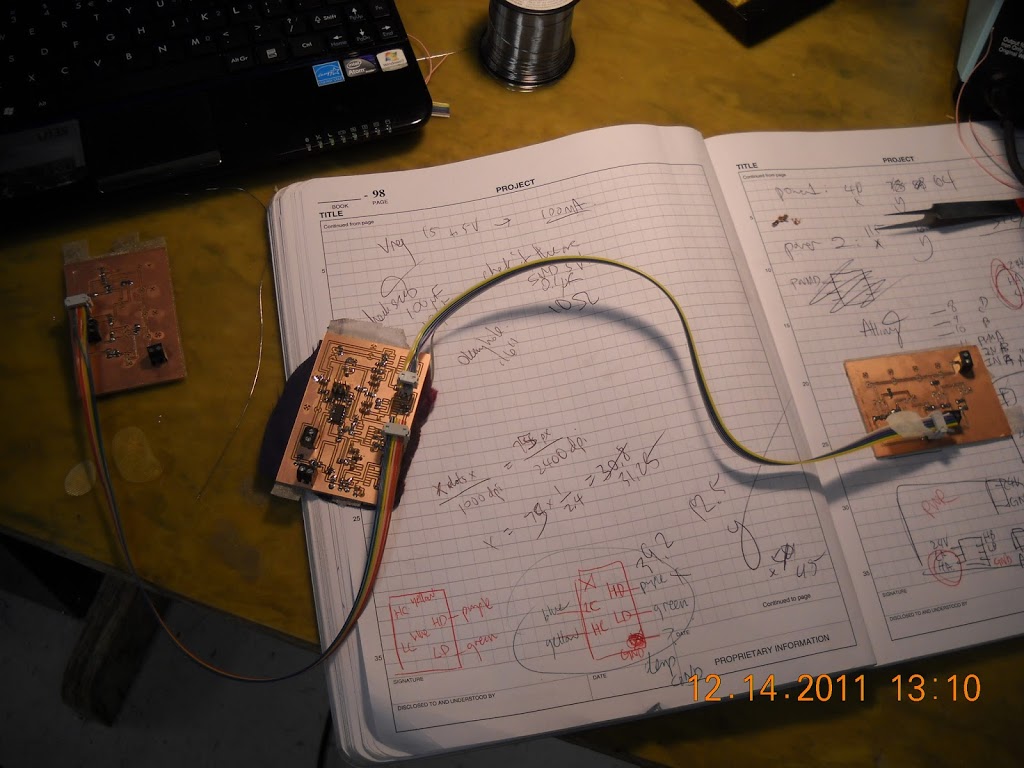
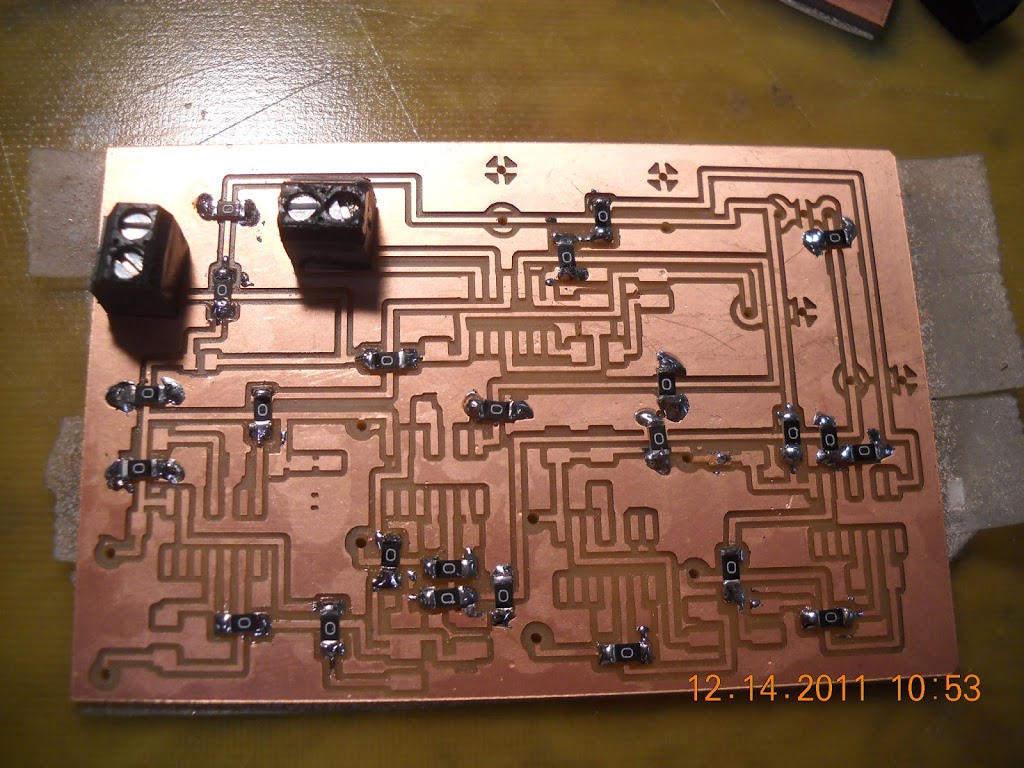
| power board (4 FETs to make a full H-bridge) |
 |
speed routing and my inexperience led to use of 24 zero ohm resistors and I still used a jumper 🙂
 |
| hai zero ohm resistor friends |
I create zero-ohm resistors a dumb way that actually turns out to be helpful when populating a lot of them. Since they each have an air wire, I can set air wires to a nice contrasting color and see where they all are:

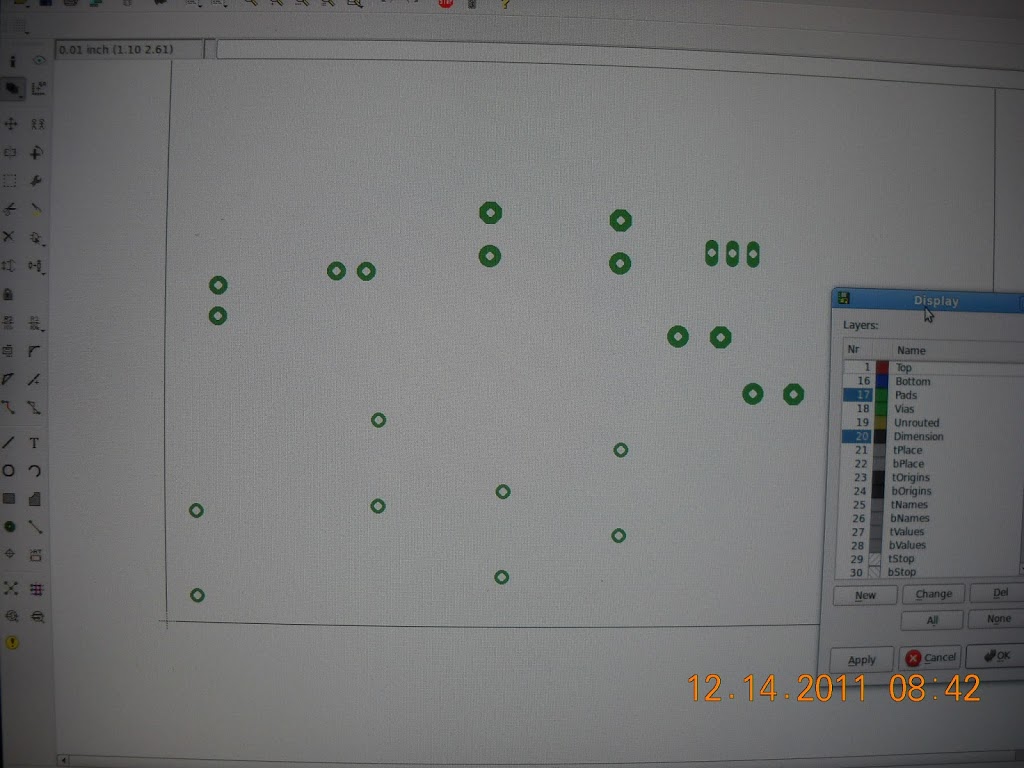
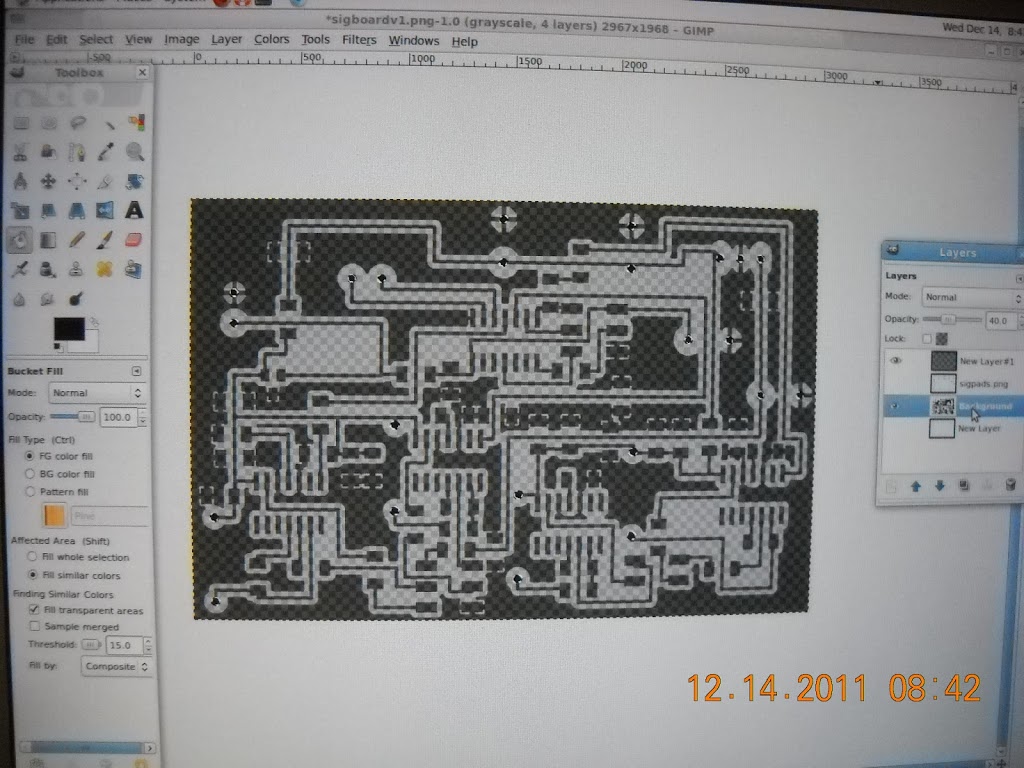
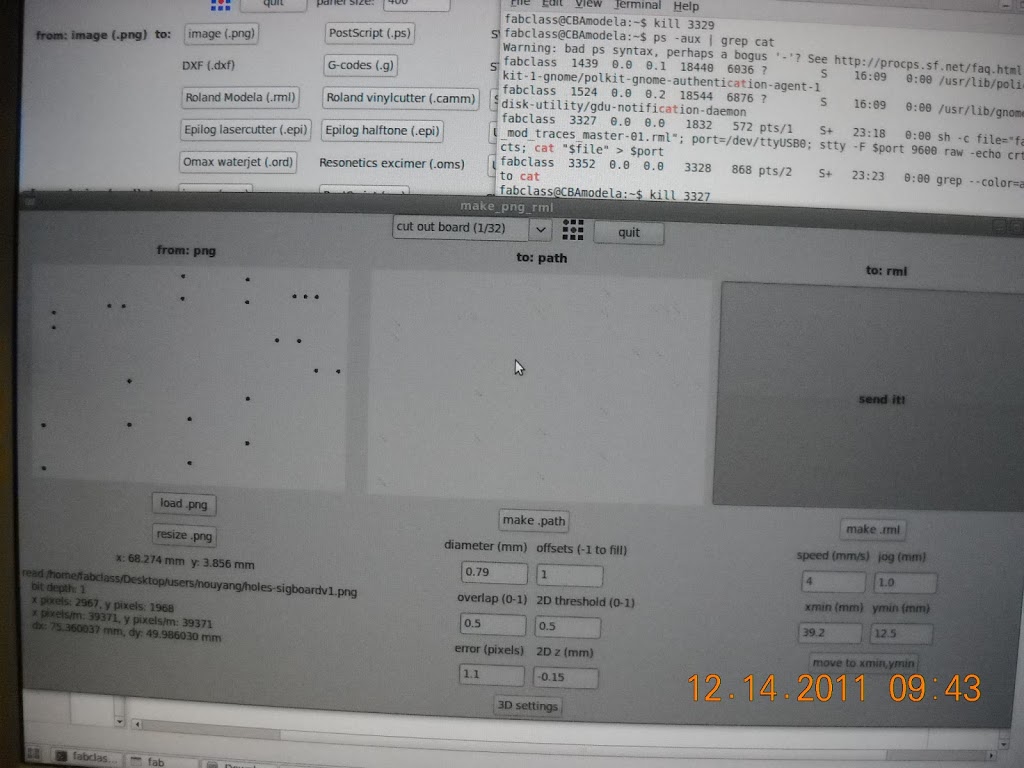
Another note, I milled out the moles CNC-ly too using GIMP to get the traces I needed, but :/ milled them out too small and had difficulty getting the 3.5mm spacing power connectors to go through the board — had to carefully use a vise.